PORTFOLIO
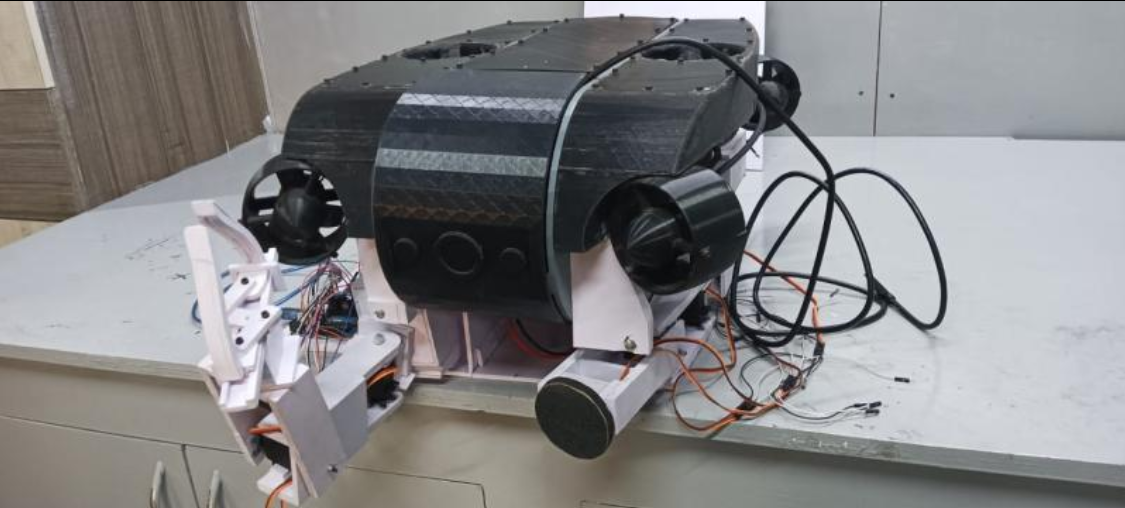
Oceanus: Underwater Robot
An Underwater Remotely Operated Robot having 4 DOF used for underwater navigation, marine survellience and maintenance.

Articulated Robotic Arm
A 4 DOF Articulated Robotic Arm capable of Pick & Place operation via manual controlling and record & repeat using FK and IK.
Drone Simulation
Simulation of picking strawberry boxes from the strawberry farm and placing them on respective trucks using ROS and Gazebo.

Tricopter Drone
A 3-propeller drone in Y-configutation created to test drone fligt operation and stability using advanced flight controllers like Pixhawk, aerodynamic propellers.
TRON G-21: Animation
3D model of an articulated robotic arm designed and animated in Fusion 360 software, to simulate the working in industrial environment for glass panels picking and placing.
LUCY: Home Assistant
A 8051 based home assistant project which is capable of controlling home appliances using voice commands and touch panel.
Stewart Platform
A PID Control based stewart platform, which is capable of balancing the object placed on top of it, making sure it doesn't fall.